home > 製品情報 > シミュレーションシステム > 製品群から探す > 研究・開発 > SDMG®(Space Designed Model Generator)
研究・開発
SDMG®(Space Designed Model Generator)
SDMG®の主な機能
- 任意の道路モデル作成
- OpenDRIVE®データから道路モデル作成
- 路面標示、道路標識、建造物等の配置
- OpenSCENARIO®のインポート/エクスポート
- GPS/IMUによる走行データのインポート
- 自車両、他車両、人物等の配置
- 各種イベント/条件判定に関する制御設定
- アセットへDIVP®※マテリアルをアサイン
- アセット制御情報の確認
- アセットの秘匿化
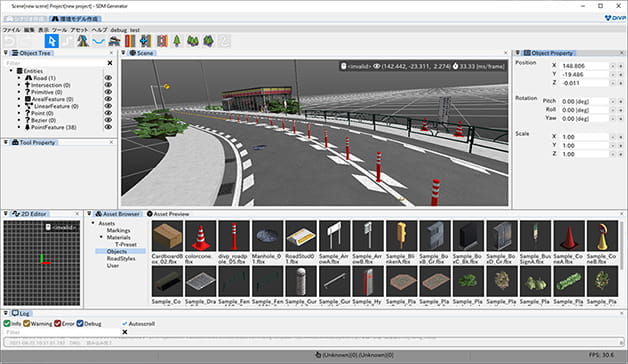
環境モデル作成機能
シナリオ作成機能
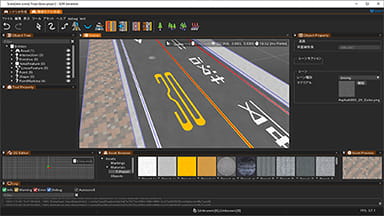
アセット編集機能

DIVP®:(Driving Intelligence Validation Platform)
内閣府主導のもと、産学官が一体となって、カメラ、レーダー、LiDARという3つのセンサをシミュレーションし、自動運転システムの評価を行うために開発したプラットフォーム。これは、国立研究開発法人新エネルギー・産業技術総合開発機構(NEDO)の委託業務の結果得られた成果を(一部)活用しています。
環境モデル作成機能
テストに必要な交通環境モデルを自在に作成し、多様なシーンの再現が可能です。
- ASAM標準化対応
-
- 道路走行環境
-
- OpenDRIVE®データのインポート/エクスポート
- FBX形式のアセットのインポート/エクスポート
- 仮想環境の作成
-
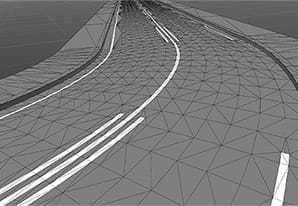
- マウス操作で走行環境モデル作成可能
-
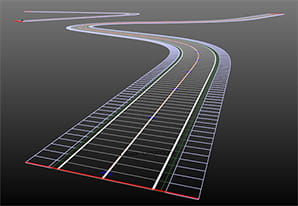
- 道路作成基準点のプロット、変数入力による道路線形データの作成
- ライブラリから道路諸元やテクスチャなどを選択して設定
- ライブラリから道路標示/道路標識/道路周辺地物や建物等を選択して配置
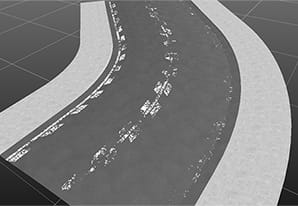
- かすれ白線の設定(剥離率0~100%を指定して自動生成)
- 走行環境モデルの出力
-
- アセット(FBX形式)とOpenDRIVE®データをペア出力

©OpenStreetMap Contributors, CC-BY-SA

変換
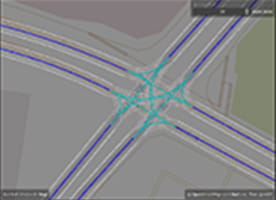
指定範囲のOpenStreetMap®をダウンロードし、OpenDRIVE®へ変換が可能です。(オプション)
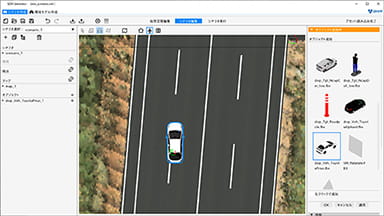
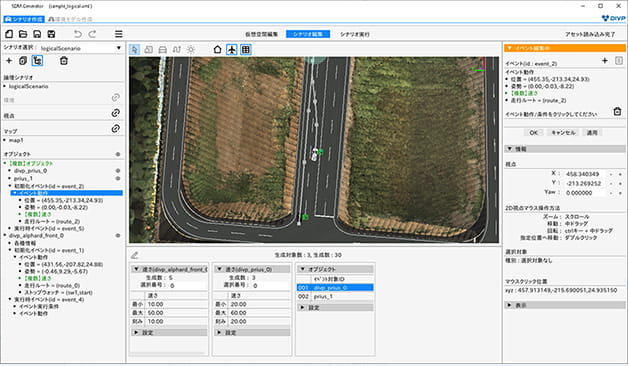
シナリオ作成機能
車両や物標を配置し、DIVP®シミュレータに用いるシナリオを作成、編集機能を備えています。NCAPなどのアセスメントシナリオも簡単に作成できます。
- 標準化対応
-
- シナリオ環境
-
- OpenSCENARIO®のインポート/エクスポート
- 独自仕様(機能補完含む)シナリオファイル(XML)の入出力
- 実験データ取込み
-
- CSVデータのインポート
- 独自シナリオの設定
-
- 経路やイベントの設定
-
- 任意経路設定、OpenDRIVE®経路に沿った走行ルートの設定
- ライブラリから自車両、他車両、人物等を選択して配置
- 速度/加速度など各種イベント/発現条件に関する制御の設定
- 環境条件の設定
-
- 気象(雨雪)や時刻(太陽位置)等のセンサ不調シナリオの設定
- 各種シナリオの確認
-
- GUIの再生ボタンでシナリオ確認
-
- 走行機能モデル上でリアルタイムにプレビュー可能
- 交通環境モデルとの複合シナリオ連接(今後の対応)
-
- 信号機切替、他車両走行・人物歩行等の自律制御に対応


標準3Dアセット一例





オプション地図アセット

